【RL】强化学习小例子 Q table 表单 Q learning 算法
看了两天书本《深入浅出强化学习》,感觉对概念理解的还是太笼统。鉴于做中学的思想,准备找个小例子跑一跑程序,加深下理解。
找了很多,要么太难,要么太笼统。只找到了莫烦Python老师的这个小例子,不仅有代码,还有视频讲解,感觉很多,跟着大佬学一学。
0. 任务描述
使用的任务是一个1维世界,在世界的右边有宝藏,智能体只要得到宝藏尝到了甜头,以后就记住了得到宝藏的方法,这就是智能体用强化学习所学习到的行为。
-o---T # T is the position of treasure, o is the position of agent
Q - learning 是一种记录行为值(Q value)的方法,每种在一定状态的行为都会有一个值 Q ( s , a ) Q(s,a) Q(s,a),就是说行为 a a a 在状态 s s s 状态的值是 Q ( s , a ) Q(s,a) Q(s,a)。
而在探索宝藏的任务中,状态 s s s 就是 agent 的位置。而在每一个位置都能做出两个行为 a = left/right a = \text{left/right} a=left/right。
关于行为选择的判定标准:如果在某个地点 s 1 s_1 s1,智能体在计算了他能有的两个行为 a = left/right a = \text{left/right} a=left/right 后,结果是 Q ( s 1 , a 1 ) > Q ( s 1 , a 2 ) Q(s_1,a_1) > Q(s_1, a_2) Q(s1,a1)>Q(s1,a2),那么智能体就会选择 a 1 = left a_1 = \text{left} a1=left 这个行为。
1. 伪代码
先把要实现的伪代码放出来:
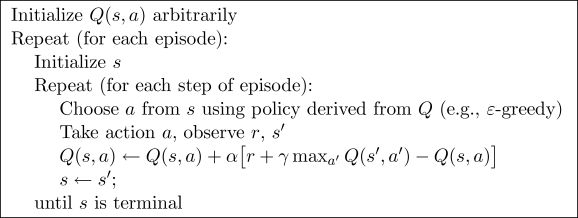
简单翻译过来就是:
- 首先初始化 Q ( s , a ) Q(s,a) Q(s,a) 表
- 重复
2.1 初始化状态 s s s
2.2 重复
\quad 2.2.1 从 Q Q Q 表中根据状态 s s s 选择行为动作 a a a
\quad 2.2.2 根据行为动作 a a a,产生奖励 r r r 和下一步状态 s ′ s' s′
\quad 2.2.3 更新 Q Q Q 表 Q ( s , a ) Q(s,a) Q(s,a)
\quad 2.2.4 更新状态 s ′ s' s′
2.3 直到状态 s s s 达到结束状态
2. Python 代码实现
2.1 初始化一些参数
import numpy as np
import pandas as pd
import time
np.random.seed(2) # reproducible
N_STATES = 6 # the length of the 1 dimensional world
ACTIONS = ['left', 'right'] # actions of agent
EPSILON = 0.9 # greedy policy
ALPHA = 0.1 # learning rate
GAMMA = 0.9 # discount factor
MAX_EPISODES = 13 # maximum episodes
FRESH_TIME = 0.3 # fresh time for one move
2.2 新建一个空的 Q 表
def build_q_table(n_states, actions):
table = pd.DataFrame(
np.zeros((n_states, len(actions))), # q_table
columns=actions, # columns 对应的是行为名称
)
return table
上述代码的结果为
# print(build_q_table(N_STATES, ACTIONS))
# left right
# 0 0.0 0.0
# 1 0.0 0.0
# 2 0.0 0.0
# 3 0.0 0.0
# 4 0.0 0.0
# 5 0.0 0.0
2.3 行为选择
传入状态, Q Q Q 表
def choose_action(state, q_table):
# This is how to choose an action
state_actions = q_table.iloc[state, :]
if (np.random.uniform() > EPSILON) or ((state_actions == 0).all()): # act non-greedy or state-action have no value
action_name = np.random.choice(ACTIONS)
else: # act greedy
action_name = state_actions.idxmax() # replace argmax to idxmax as argmax means a different function in newer version of pandas
return action_name
2.4 环境反馈
def get_env_feedback(S, A):
# This is how agent will interact with the environment
if A == 'right': # move right
if S == N_STATES - 2: # terminate
S_ = 'terminal'
R = 1
else:
S_ = S + 1
R = 0
else: # move left
R = 0
if S == 0:
S_ = S # reach the wall
else:
S_ = S - 1
return S_, R
2.5 更新环境
def update_env(S, episode, step_counter):
# This is how environment be updated
env_list = ['-']*(N_STATES-1) + ['T'] # '---------T' our environment
if S == 'terminal':
interaction = 'Episode %s: total_steps = %s' % (episode+1, step_counter)
print('\r{}'.format(interaction), end='')
time.sleep(2)
print('\r ', end='')
else:
env_list[S] = 'o'
interaction = ''.join(env_list)
print('\r{}'.format(interaction), end='')
time.sleep(FRESH_TIME)
2.6 主循环
def rl():
# main part of RL loop
q_table = build_q_table(N_STATES, ACTIONS)
for episode in range(MAX_EPISODES):
step_counter = 0
S = 0
is_terminated = False
update_env(S, episode, step_counter)
while not is_terminated:
A = choose_action(S, q_table)
S_, R = get_env_feedback(S, A) # take action & get next state and reward
q_predict = q_table.loc[S, A]
if S_ != 'terminal':
q_target = R + GAMMA * q_table.iloc[S_, :].max() # next state is not terminal
else:
q_target = R # next state is terminal
is_terminated = True # terminate this episode
q_table.loc[S, A] += ALPHA * (q_target - q_predict) # update
S = S_ # move to next state
update_env(S, episode, step_counter+1)
step_counter += 1
return q_table
if __name__ == "__main__":
q_table = rl()
print('\r\nQ-table:\n')
print(q_table)