ESP32-连接参数/间隔更新
连接间隔的设置是一个协商的过程,ESP32提供了一些协商的接口,按顺序分析一下。
Step 1:首先是Client连接时对Server要求的连接间隔(确定值)
在连接的时候,Client会把当前的连接间隔发送给Server。在Server的连接事件回调函数中,我们是可以看到这个Client要求的连接间隔的,主要是从这个结构体获得。
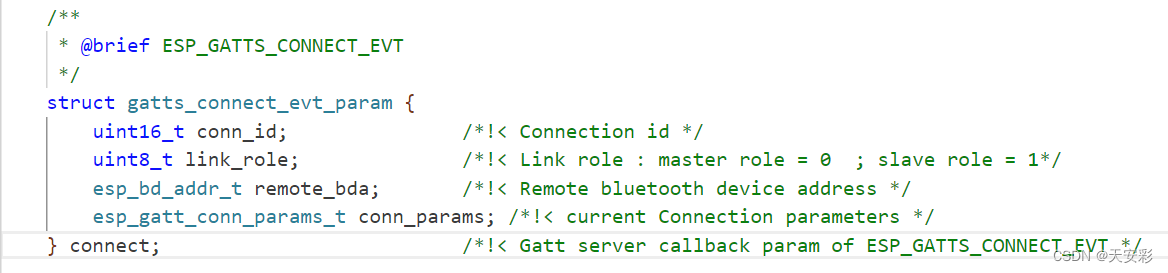
再具体些是这样一个结构体。

以下是在连接事件回调函数中查看Client要求的连接间隔的代码,适用于Arduino和ESP-IDF
// 在连接事件回调函数中查看Client要求的连接间隔
// 适用于Arduino和ESP-IDF
esp_gatt_conn_params_t conn_params;
memcpy(&conn_params, ¶m->connect.conn_params, sizeof(esp_gatt_conn_params_t));
Serial.println(conn_params.interval*1.25); // 换成ESP-IDF的LOG就行Step 2:然后是Server请求更新间隔范围(是范围哦)
主要是调用这个函数,Server向Client发送的连接间隔更新请求。
esp_err_t esp_ble_gap_update_conn_params(esp_ble_conn_update_params_t *params);用的这样的一个结构体:

在ESP-IDF里面,在Server连接之后,在连接事件的回调函数里请求更新:
case ESP_GATTS_CONNECT_EVT:
ESP_LOGI(GATTS_TABLE_TAG, "ESP_GATTS_CONNECT_EVT, conn_id = %d", param->connect.conn_id);
esp_log_buffer_hex(GATTS_TABLE_TAG, param->connect.remote_bda, 6);
// 在这里把Step1的代码放进来可以看到Client在本次连接开始时要求的连接参数:
// 以下时Step2的关键代码:
esp_ble_conn_update_params_t conn_params = {0};
memcpy(conn_params.bda, param->connect.remote_bda, sizeof(esp_bd_addr_t));
conn_params.latency = 0;
conn_params.max_int = 0x20; // max_int = 0x20*1.25ms = 40ms
conn_params.min_int = 0x10; // min_int = 0x10*1.25ms = 20ms
conn_params.timeout = 400; // timeout = 400*10ms = 4000ms
esp_ble_gap_update_conn_params(&conn_params);
break;而在Arduino ESP32里面,大佬们已经把这段话封装成了函数,就是下面这个:
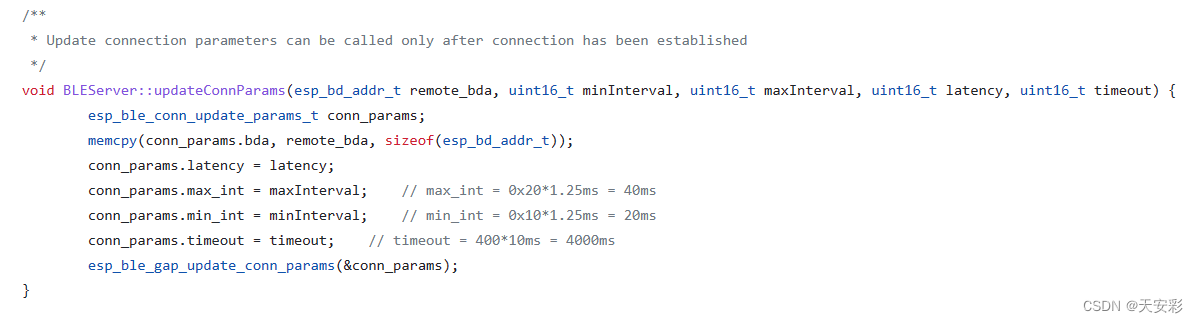
因此在Arduino里面,只需要在连接回调函数里调用这个函数就可以请求更新间隔了。
esp_bd_addr_t connectedAddress; // 被连接的地址
class MyServerCallbacks: public BLEServerCallbacks
{
void onConnect(BLEServer* pServer,esp_ble_gatts_cb_param_t* param) {
// 在这里把Step1的代码放进来可以看到Client在本次连接开始时要求的连接参数:
// 以下时Step2的关键代码:
memcpy(connectedAddress, param->connect.remote_bda, sizeof(esp_bd_addr_t));
pServer->updateConnParams(connectedAddress,6,6,0,500);
};
void onDisconnect(BLEServer* pServer) {
}
};Step 3:最后是查看Client和Server的当前连接间隔
连接间隔是一个协商的过程,最开始,也就是刚连接上时,Server是可以看到Client要求的连接间隔的,然后Server请求更新一个更适合自己的参数范围,Client收到请求后,Client的协议栈会根据情况最终决定一个新的连接间隔,这个最终决定权在Client,那要怎么知道是否更新成功呢,或者说怎么知道当前的连接间隔呢。
法1,利用回调事件,仅适用于ESP-IDF的Server端(其实Arduino应该也会有这个事件啦,但是好像没有暴露接口给我们,就不去改源码了)。
主要是通过每次更新后产生的一个gap层的回调事件,通过回调的结构体参数打印:
case ESP_GAP_BLE_UPDATE_CONN_PARAMS_EVT:
ESP_LOGI(GATTS_TABLE_TAG, "update connection params status = %d, min_int = %d, max_int = %d,conn_int = %d,latency = %d, timeout = %d",
param->update_conn_params.status,
param->update_conn_params.min_int,
param->update_conn_params.max_int,
param->update_conn_params.conn_int, //当前连接间隔可能不在范围内,因为是由Client决定的
param->update_conn_params.latency,
param->update_conn_params.timeout);
break;要注意,当前连接间隔可能不在Server请求的范围内,因为决定权最终是由Client决定的。
法2:调用查询函数,这个函数可以用在Server和Client,用在连接后的任意地方,这个函数是:
esp_err_t esp_ble_get_current_conn_params(esp_bd_addr_t bd_addr, esp_gap_conn_params_t *conn_params);它用到这样一个结构体变量,但是只要新建这个变量就行,然后把指针传到上面这个函数,函数会把结果放进这个结构体
 就是下面这段代码
就是下面这段代码
esp_gap_conn_params_t conn_params;
esp_err_t ret = esp_ble_get_current_conn_params(connectedAddress, &conn_params);
Serial.println(ret);
Serial.println(conn_param2.interval*1.25);好了,这样就可以知道当前实际的连接间隔了。
Step 4:回到最初的设置
回到最初,说的是一开始Client会给Server发送一个初始的连接间隔,那这个初始的间隔俺们能不能自己设置呢。我找了一个这个接口,这个应该是在连接建立之前让Client调用来进行设置的,很奇怪,设置的是一个范围而不是一个具体的值。
esp_err_t esp_ble_gap_set_prefer_conn_params(esp_bd_addr_t bd_addr, uint16_t min_conn_int, uint16_t max_conn_int, uint16_t slave_latency, uint16_t supervision_tout);由于没有对这个函数进行测试,这里简单说说我的总结(猜想),最开始,用这个函数设置了Client的连接间隔范围,协议栈从中选定一个初始连接间隔对Server发起连接,Server通过Step1可以看到这个初始连接间隔,Server通过Step2发来一个它需要的连接间隔范围,Client的协议栈在两个范围内取交集,如果没有交集则优先满足Client的范围。我们最后通过Step3可以查到最终的连接间隔是什么。也就是说,Client的协议栈才是最终的老大。